Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Reflecting on the moment I captured this photo, I remember being struck by the beauty of the landscape and the joyful presence of my dog Simba. But now, when I look back at the picture, the vividness of that day escapes me. The depth and scale of the scenery, the true size of my fluffy companion—these details are lost in the flatness of the 2D image. It’s a common dilemma with traditional photography. This realization spurred my interest in developing methods to transform such 2D images into 3D models, allowing us to relive our memories with a richness that matches the original experience. My work in geometric 3D reconstruction is a step towards this future, where capturing life in all its dimensions could be as simple as taking a picture with our phones..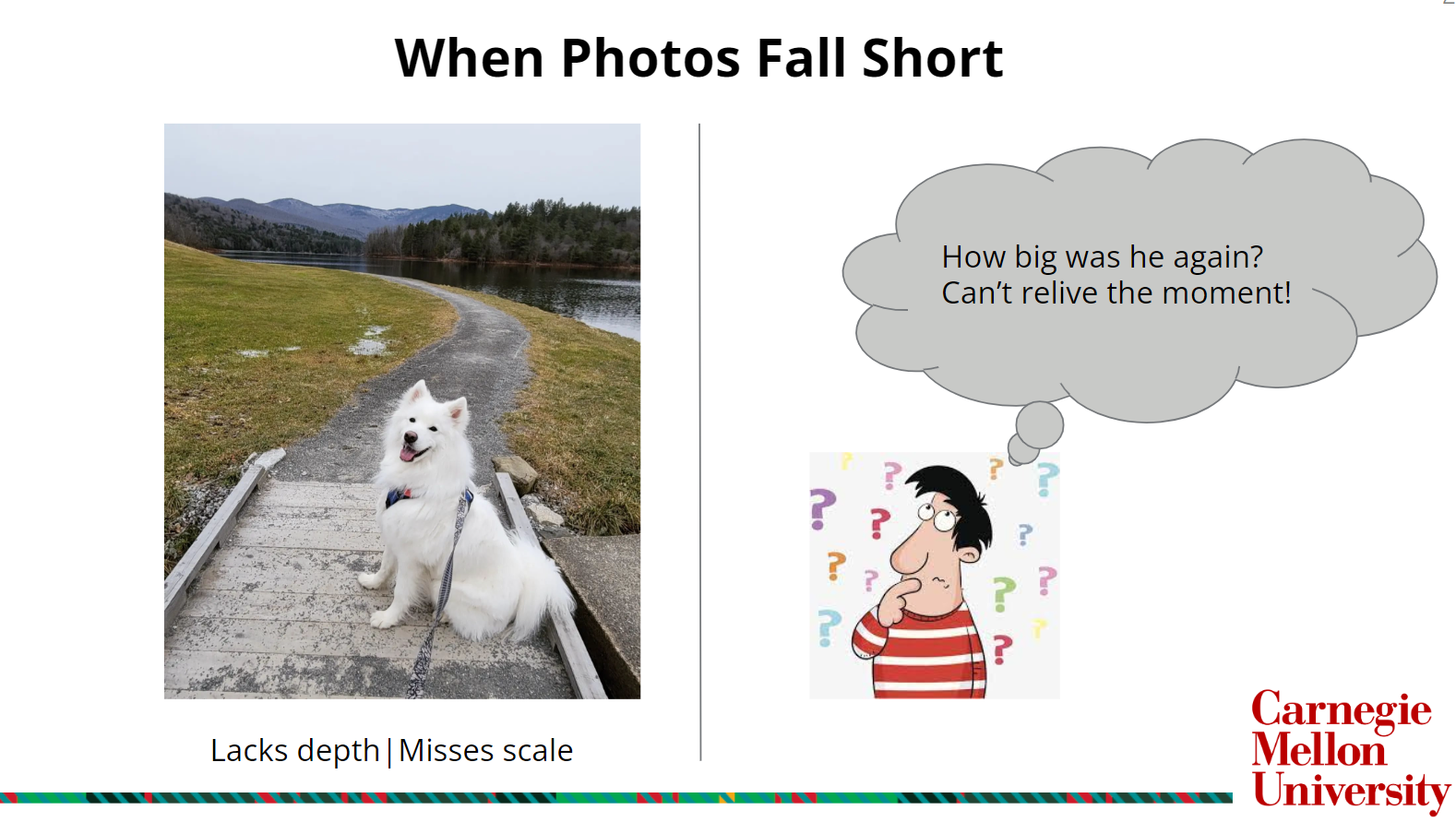
Delving into the realm of dynamic environments in my Planning and Decision-making in Robotics course, I faced the intricate challenge of intercepting a moving target—a task that pushed the boundaries of strategic robotic planning. My solution involved A* search and the implementation of backward Dijkstra based heuristic calculation in C++, focusing on optimizing performance times and memory efficiency..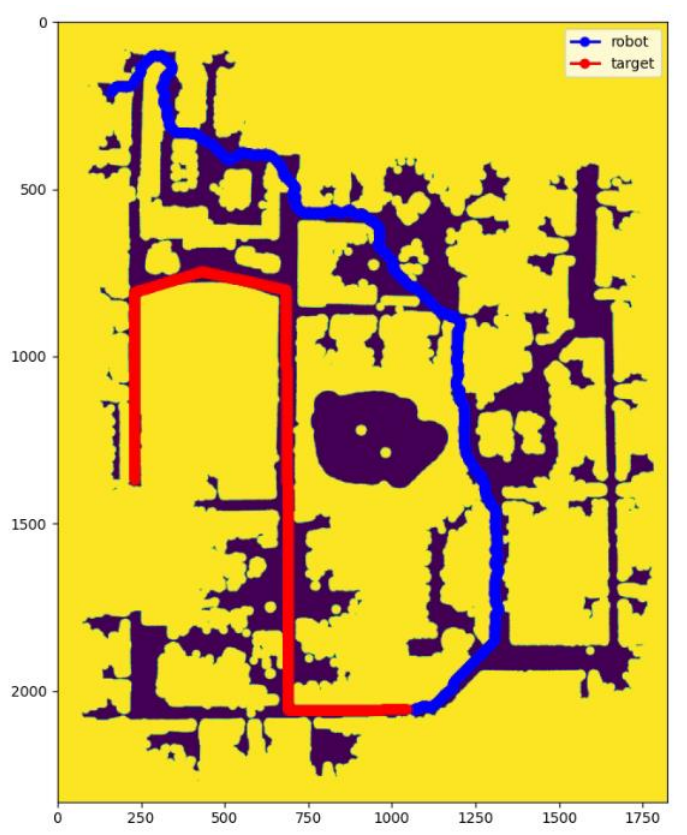
In this project, I confronted the dynamic challenge of sampling based path planning for a robotic arm. This required precise path planning under constraints, for which I developed a sophisticated C++ planner.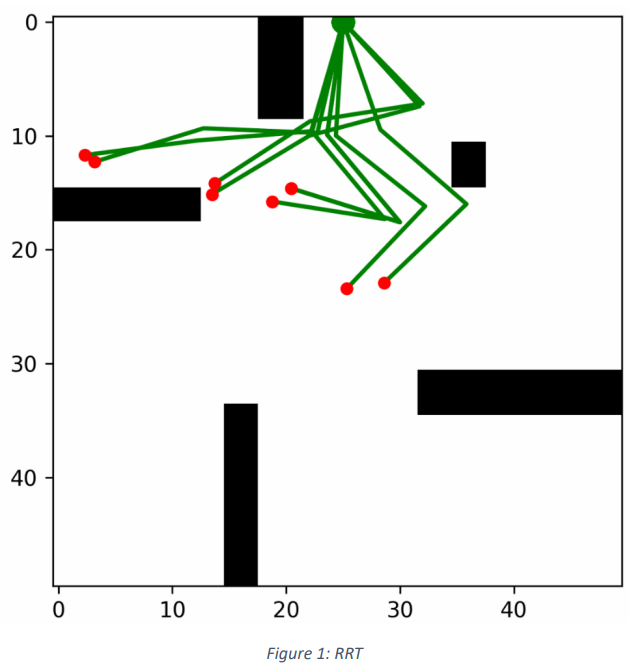
A major chunk of my research at the Robotic Caregiving and Human Interaction Lab, undertaken at Carnegie Mellon University, focuses on enhancing the capabilities of robot-assisted feeding systems. Aimed at improving the quality of life for individuals who struggle with self-feeding, this research develops a control primitive enabling a robotic arm to adeptly scoop varying amounts of food.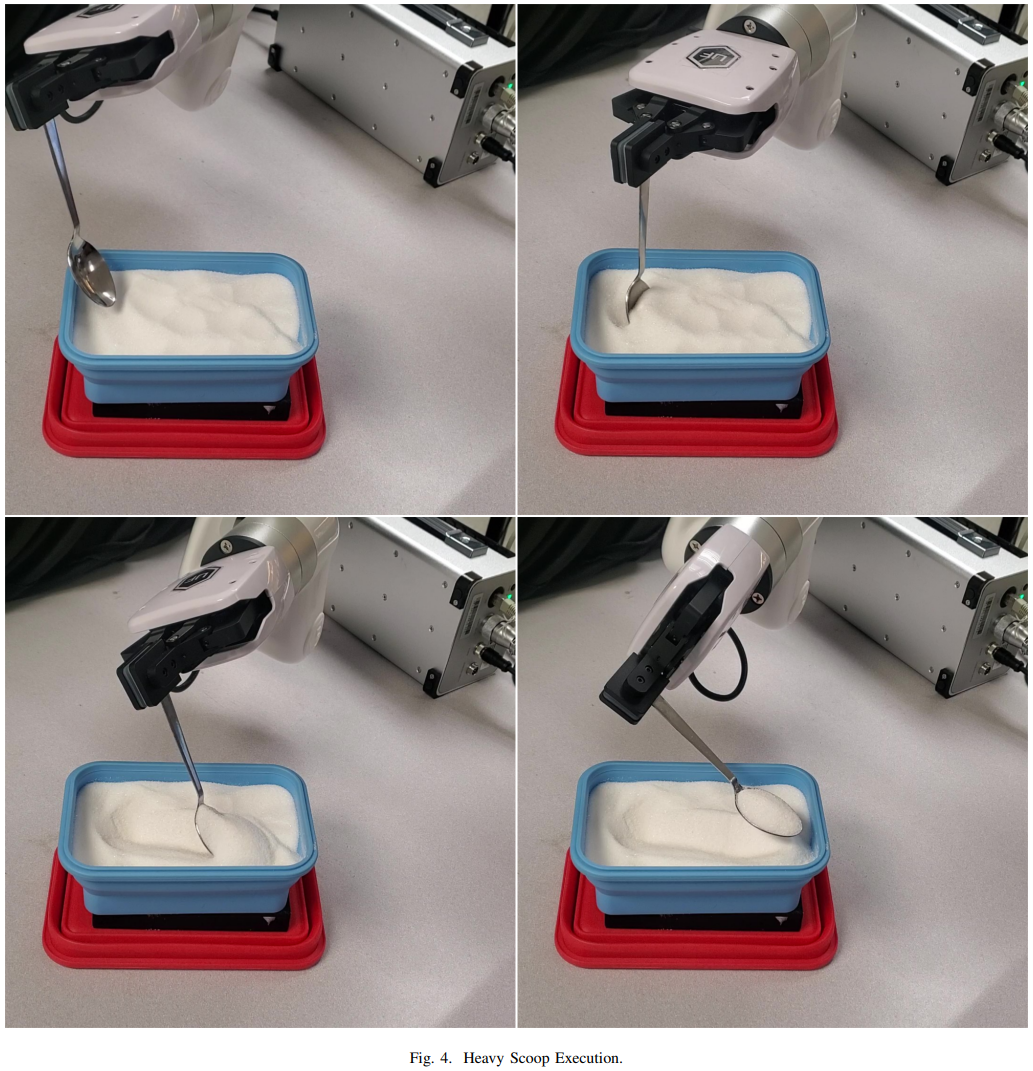
My crack at implementing a generic symbolic planner involved constructing a planner capable of parsing an environment’s symbolic description and generating an actionable sequence to transition from an initial state to a goal. The environment, exemplified by the Blocks world from class, featured a set of objects and a table with specific initial and goal conditions that my planner had to navigate.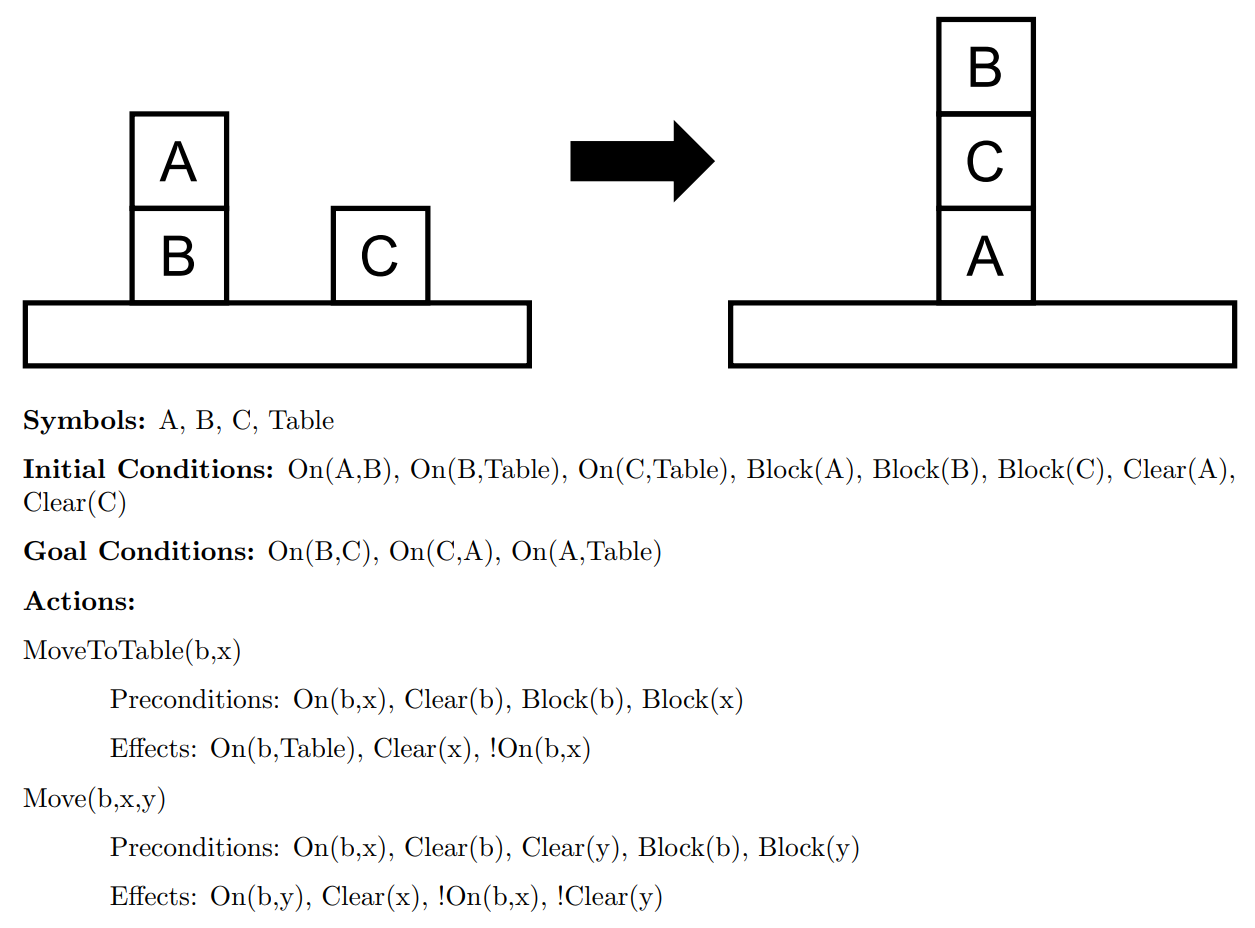
Could Synthetic Speech revolutionize Automatic Speech Recognition?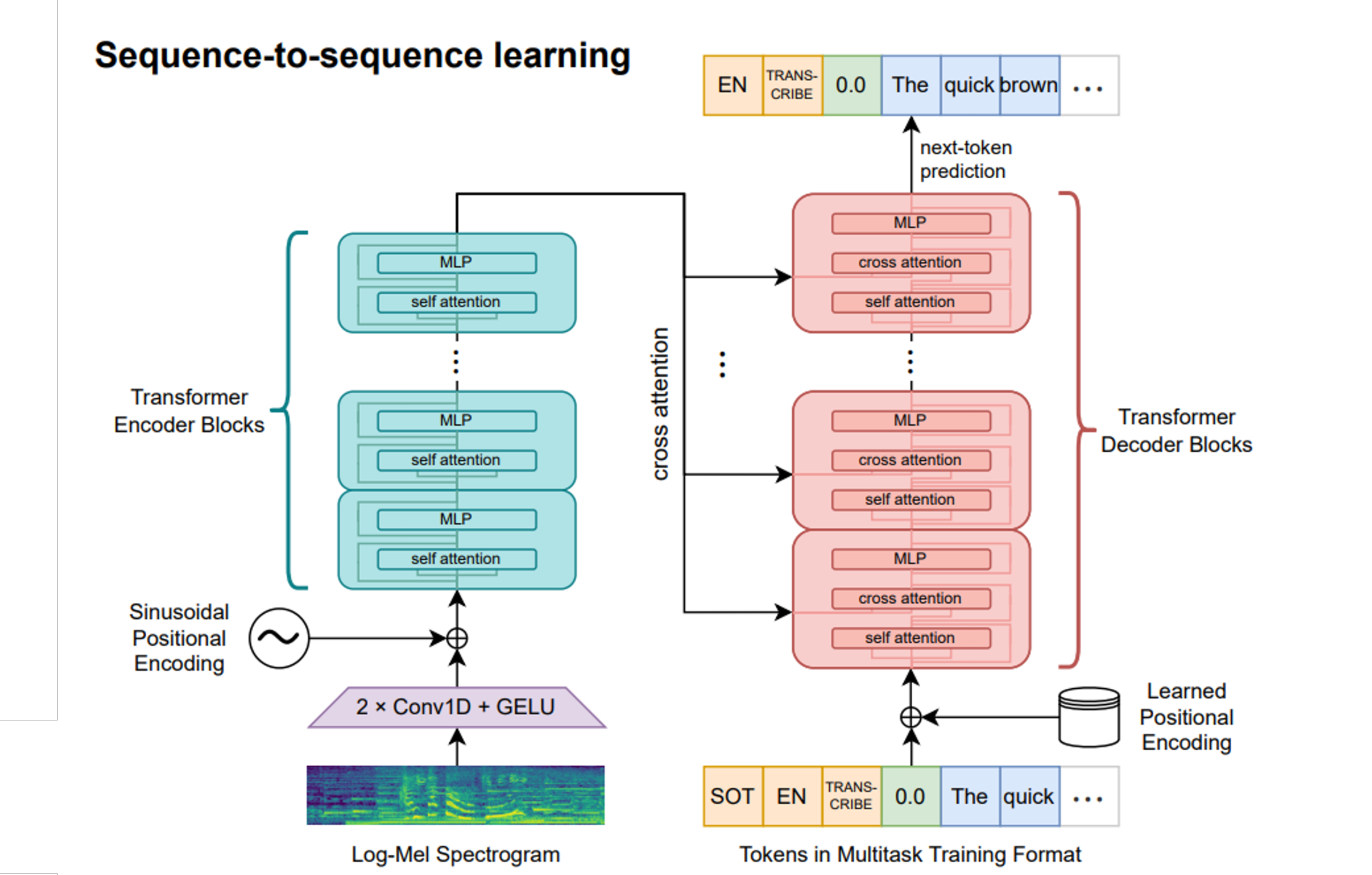
This project presents a grasp planning system for 2D planning of a robot arm and the Stretch mobile manipulator, designed for handling multiple objects on a table. It incorporates Multi Goal RRT* with a legible costmap, motivated by the gap in existing methods where the most probable grasp might require a more costly overall path. The system aims to enhance the robot’s capability in choosing the best grasping paths in cluttered environments and improve safety and intuitiveness for collaborative use.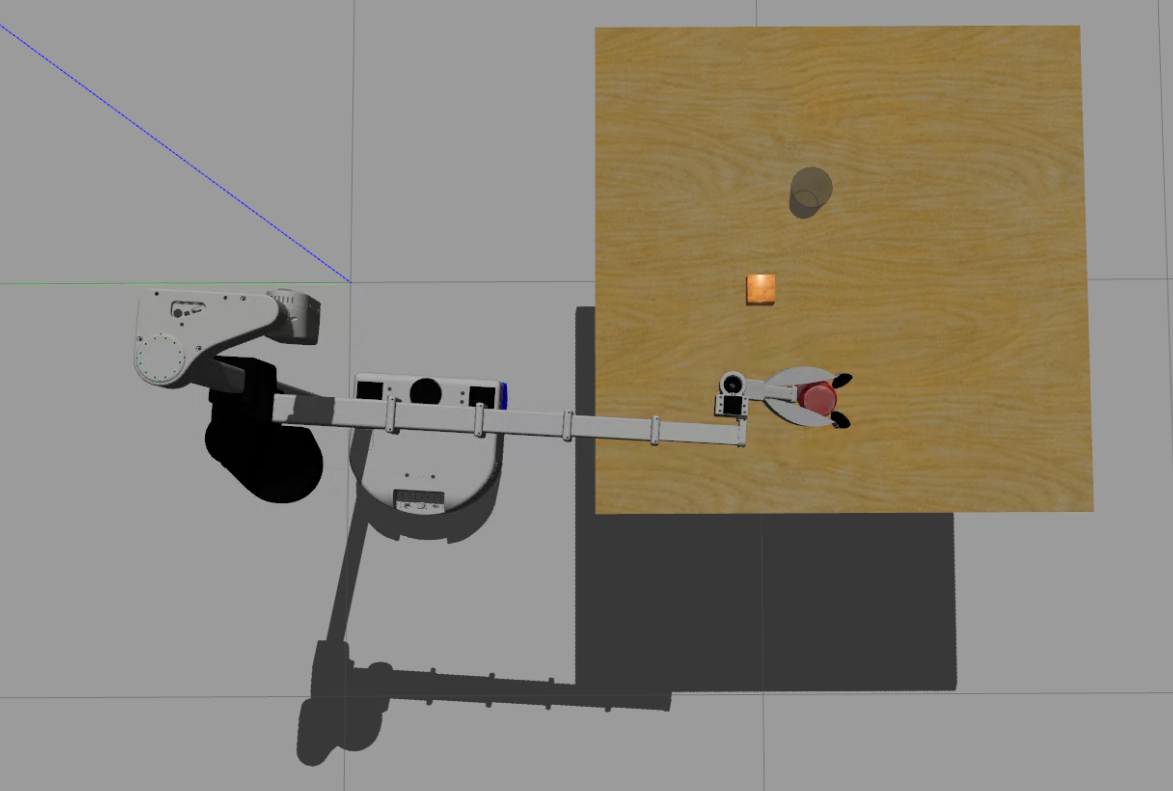
This research provides a comprehensive comparison of two case hardening alloy steels, SAE 8620 and EN 36C, in the context of their application in automotive differential gearboxes. The study aims to evaluate and contrast these materials based on various performance metrics crucial for automotive applications.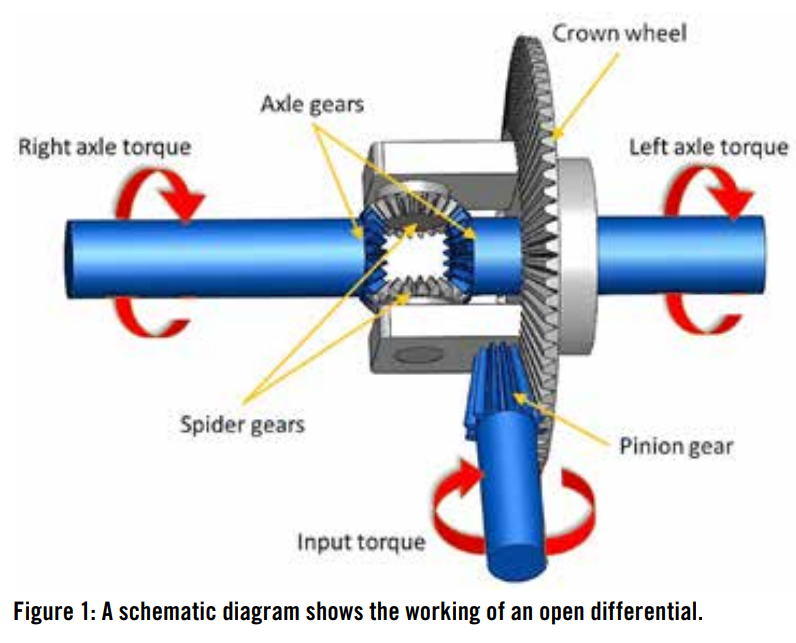
Published in GearSolutions, 2022
Using a differential gearbox design, a comparison between two popular case hardening alloy steels shows that EN 36C offers significantly better tool strength, wear resistance, and fatigue properties.
Recommended citation: Saurav Kambil, Ankur Miglani, “Comparative study of the usage of SAE 8620 and EN 36C in an automotive differential.”.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, Carnegie Mellon University, Mechanical Engineering, 2023
This course, the second in a three-semester sequence, blends mechanical principles with hands-on design projects. Students advance from 2D statics to analyzing 3D engineering systems, focusing on connections, internal loads, and friction. Topics include shear stress, shear strain, torsion, multiaxial stresses, stress transformations, and simple failure criteria. The curriculum emphasizes teamwork, hands-on and computational design projects, particularly in stress and failure analysis of 3D systems. Key skills developed include sketching ideas, interpreting and creating engineering drawings, CAD modeling, CAE tool-based performance analysis, material and manufacturing selection, and prototype creation and testing. The course aims to build comprehensive design skills, integrating theoretical knowledge with practical application.
Undergraduate Course, Carnegie Mellon University, Mechanical Engineering Department, 2023
This course represents the culmination of a three-semester sequence integrating the principles of mechanics with practical design projects. Building upon the foundation laid in the preceding courses, it offers an in-depth examination of load conditions, stresses, and deformations in essential machine elements like shafts, gears, power screws, and fasteners. Students delve into the design and application of these components, considering static and dynamic failure modes, material properties, manufacturability, and cost-effectiveness. Theoretical concepts are linked with analytical methods, computational tools, and real-world design considerations. Academic understanding is evaluated through homework, exams, and group projects, culminating in a comprehensive learning experience.