
Multi-Goal Grasp Planning for Mobile Manipulators in Cluttered Environments
Overview
This project presents a grasp planning system for 2D planning of a robot arm and the Stretch mobile manipulator, designed for handling multiple objects on a table. It incorporates Multi Goal RRT* with a legible costmap, motivated by the gap in existing methods where the most probable grasp might require a more costly overall path. The system aims to enhance the robot’s capability in choosing the best grasping paths in cluttered environments and improve safety and intuitiveness for collaborative use.
Abstract
This project presents a grasp planning system for 2D planning of a robot arm and the Stretch mobile manipulator, designed for handling multiple objects on a table. It incorporates Multi Goal RRT* with a legible costmap, motivated by the gap in existing methods where the most probable grasp might require a more costly overall path. The system aims to enhance the robot’s capability in choosing the best grasping paths in cluttered environments and improve safety and intuitiveness for collaborative use.
Introduction
The project focuses on efficient navigation and task execution in cluttered environments, essential for applications like data collection and manufacturing. Unlike broader multi-goal path planning approaches, this project emphasizes selecting efficient paths to a specific goal, optimizing path efficiency and task success in complex spaces. Legibility in planning is vital in scenarios involving close human-robot collaboration, making the robot’s motion safe, predictable, and expressive of its intent.

Methodology
The approach uses AnyGrasp for generating grasping goals and employs Multi Goal RRT* for efficient path traversal. The system balances path length, grasp success probability, and legibility of motion. The legibility aspect is critical for ensuring that the robot’s movements are intuitive and understandable to human collaborators.
Results
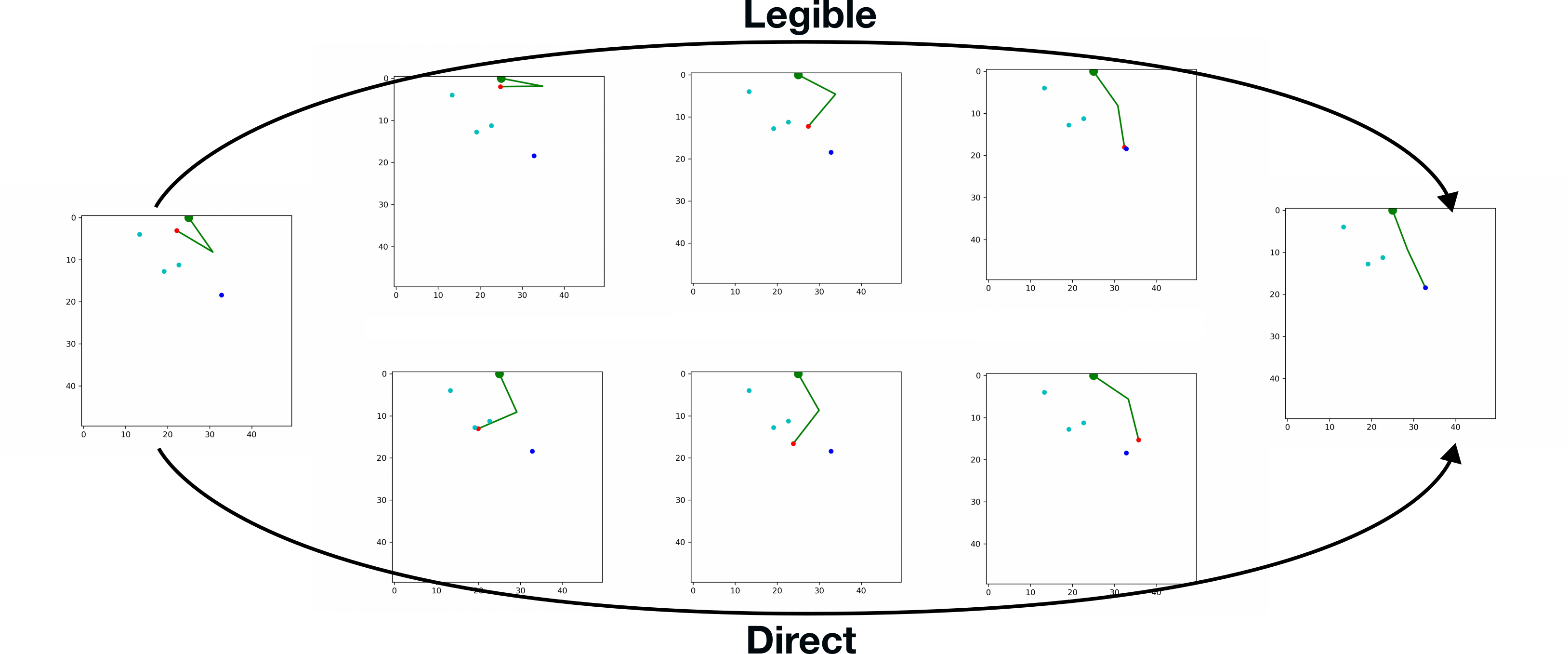
2D Robot Grasping
Tests in a 2D environment demonstrated that our method produces more legible trajectories compared to those generated by a distance costmap, especially in scenarios with multiple blocking goals.
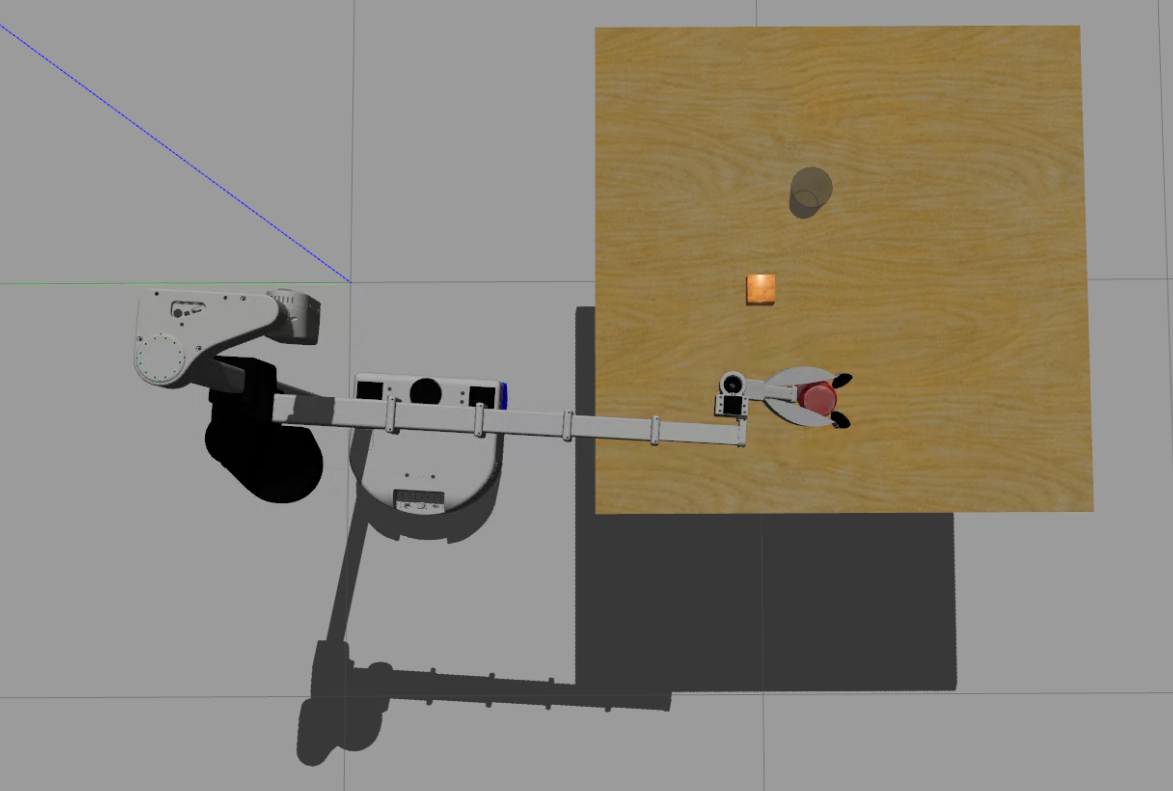
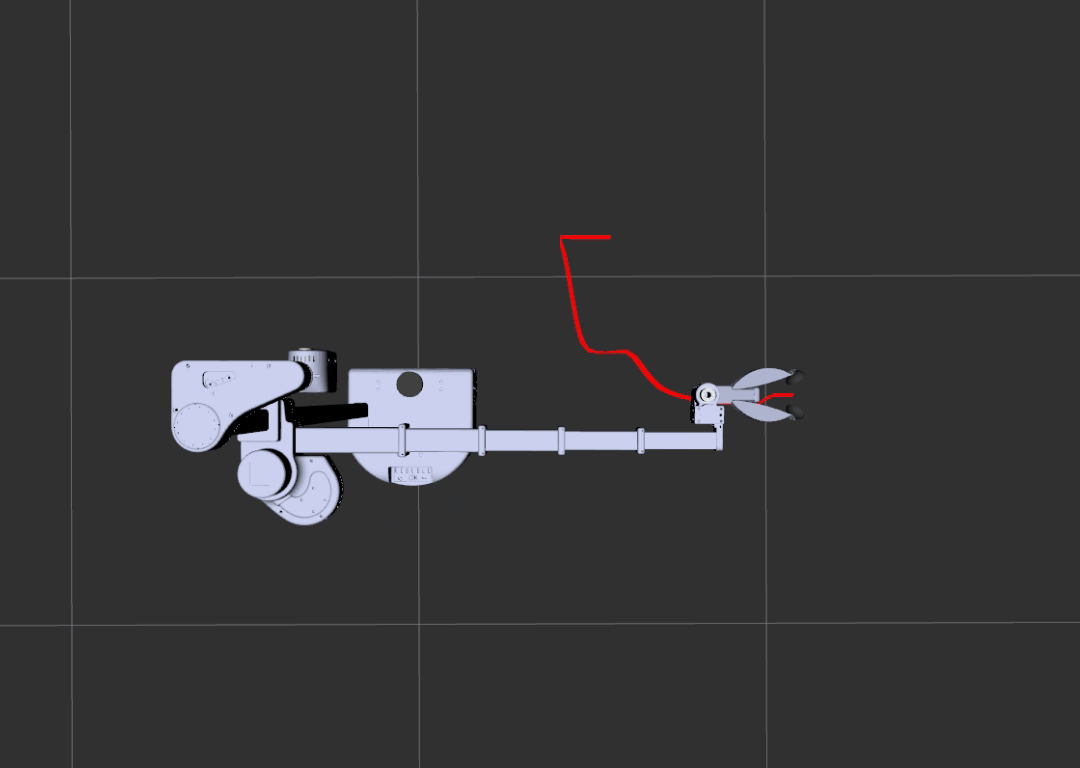
Stretch Mobile Manipulator Grasping
Implemented in a Gazebo simulation environment, the system demonstrated the generation of legible paths for the Stretch robot. The end effector’s trajectory clearly communicates the robot’s intended goal, enhancing predictability and safety in human-robot interaction.
Conclusion
The project successfully introduces a multi-goal RRT* formulation with a legibility cost function, allowing rapid and efficient planning. This system is not only functionally superior but also intuitive and reliable for use in human-robot collaborative environments.
References available upon request.