
Varied Bite Acquistion in Robot Assisted Feeding
Overview:
Eating is considered an activity of daily living (ADL) such as grooming, bathing, and brushing teeth. The inability to eat independently has a devastating impact on one’s ability to live independently and a decline in self-worth. Approximately one million people in the United States depend on caregiver’s assistance to eat. Assisted feeding is one of the most timeconsuming tasks for caregiver’s who operate in an extremely overloaded and stressful environment.
A major chunk of my research at the Robotic Caregiving and Human Interaction Lab, undertaken at Carnegie Mellon University, focuses on enhancing the capabilities of robot-assisted feeding systems. Aimed at improving the quality of life for individuals who struggle with self-feeding, this research develops a control primitive enabling a robotic arm to adeptly scoop varying amounts of food.
Initial Approach
The initial phase involved:
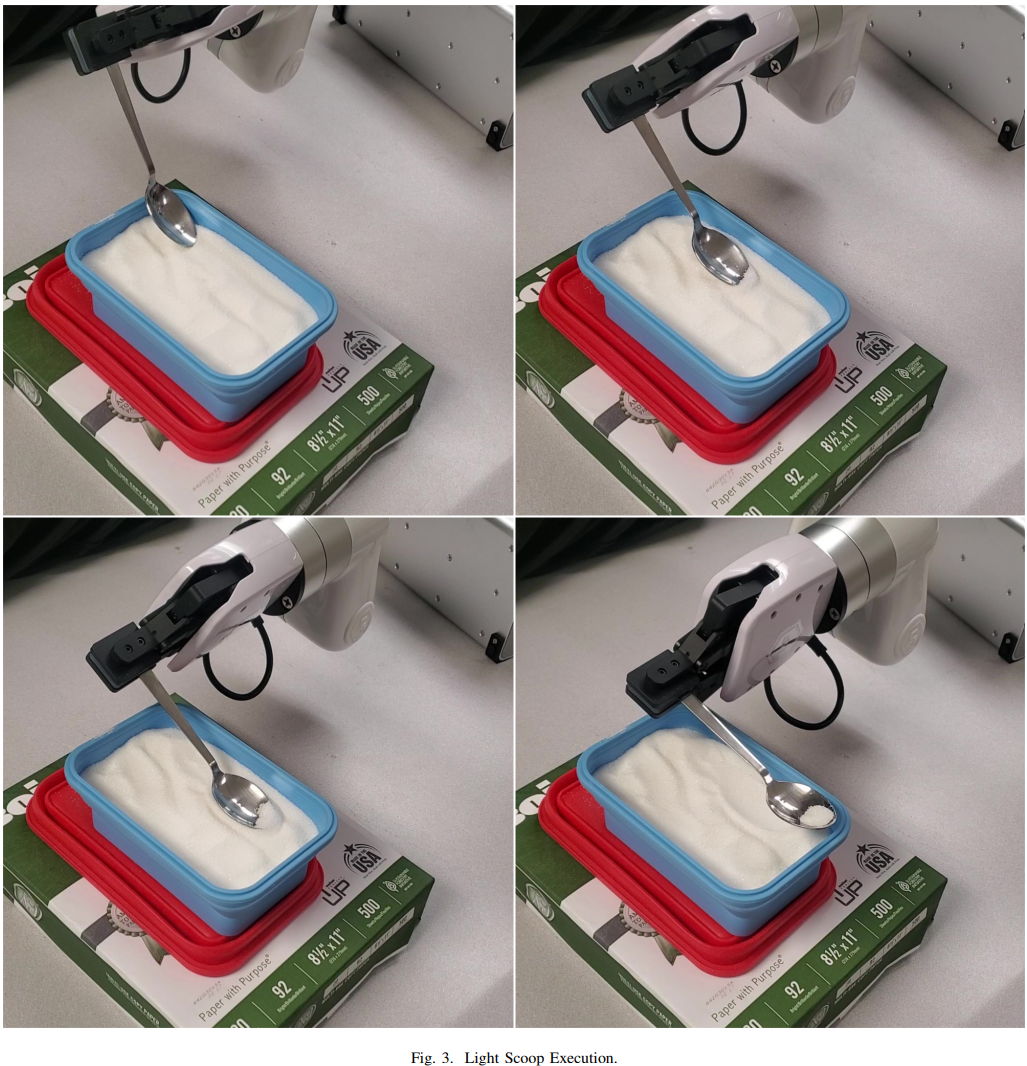
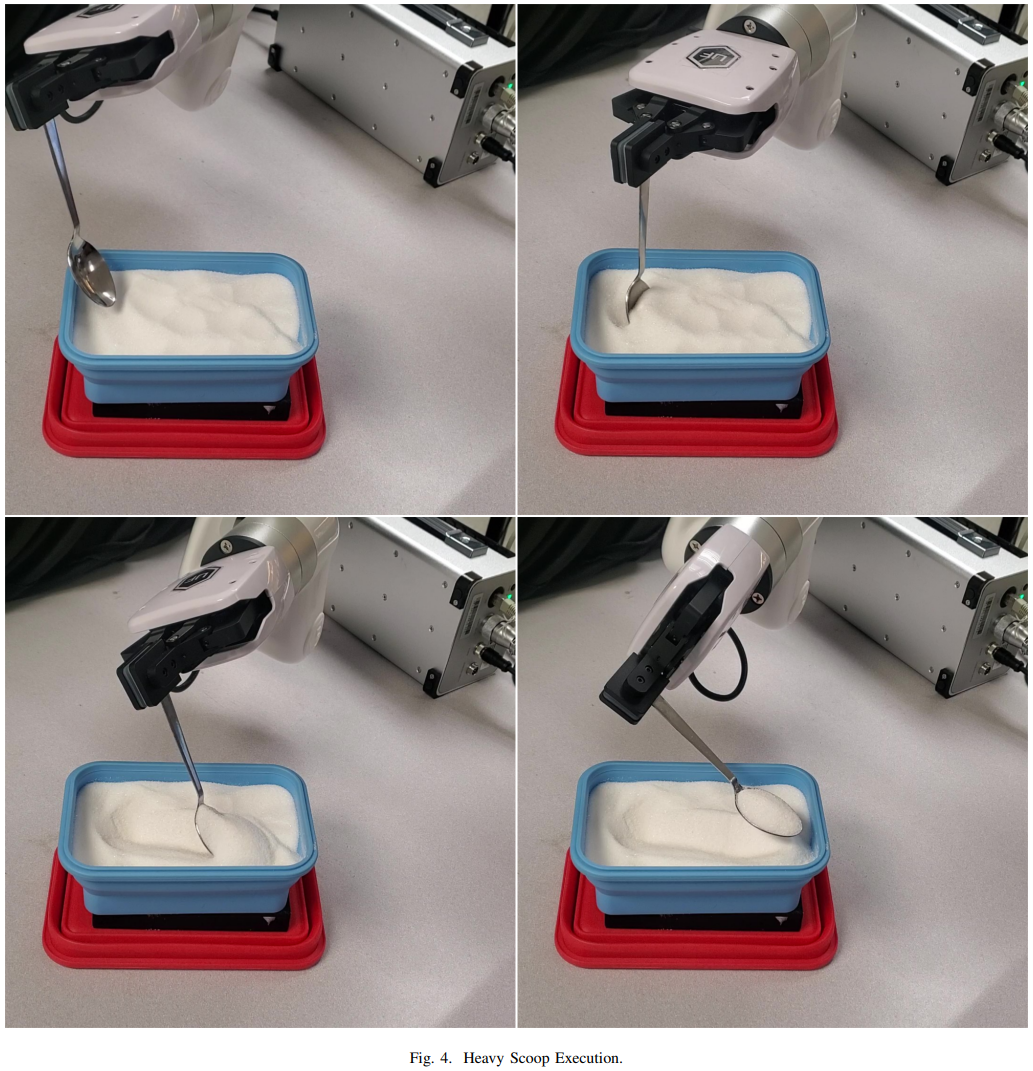
- Objective: Developing a system that learns to scoop varying food quantities, imitating human scooping motions.
- Methodology: Employing behavior cloning with a simple kinesthetic teaching method.
- Results: The neural network learned to perform distinct scooping trajectories, achieving 92% accuracy over 50 trials.
Advanced Development: Pushing Boundaries
Our subsequent phase seeks to integrate advanced technologies for refined control:
- Food Position Detection: Developing algorithms for real-time adjustments based on the food’s position.
- Depth Data Utilization: Utilizing image and depth information to enhance the precision of scooping.
- Neural Network Advancements: Exploring convolutional neural networks, particularly Toolflownet, to leverage optical flow data for improved motion accuracy.
Advanced Development: ToolFlowNet Integration
We’ve integrated a novel neural network, ToolFlowNet, into our system:
- Innovation: ToolFlowNet predicts dense per-point flow on the tool controlled by the robot.
- Application: This flow information is used to derive the necessary transformations for the robot’s actions.
- Use Cases: The network is applied to imitation learning for complex tasks like scooping and pouring with continuous tool movement.
- Performance: Demonstrates significant improvements in handling deformable objects over traditional methods that don’t utilize flow.
This research underscores our dedication to enhancing the autonomy and dignity of those requiring feeding assistance, showcasing the potential of robotics in personal care.
A report of the initial stages of our project is available here