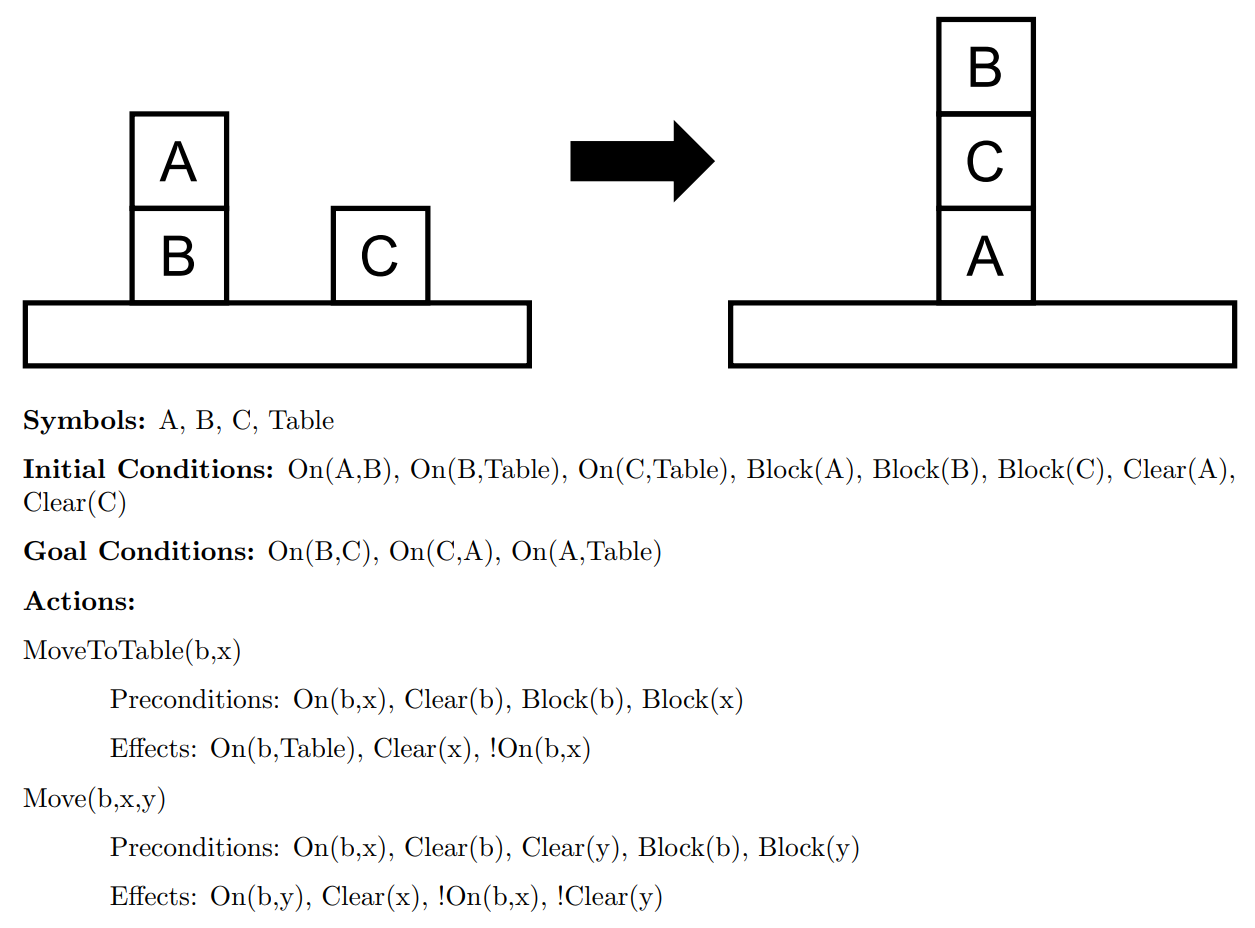
Geometric 3D reconstruction augmented with Deep Learning features
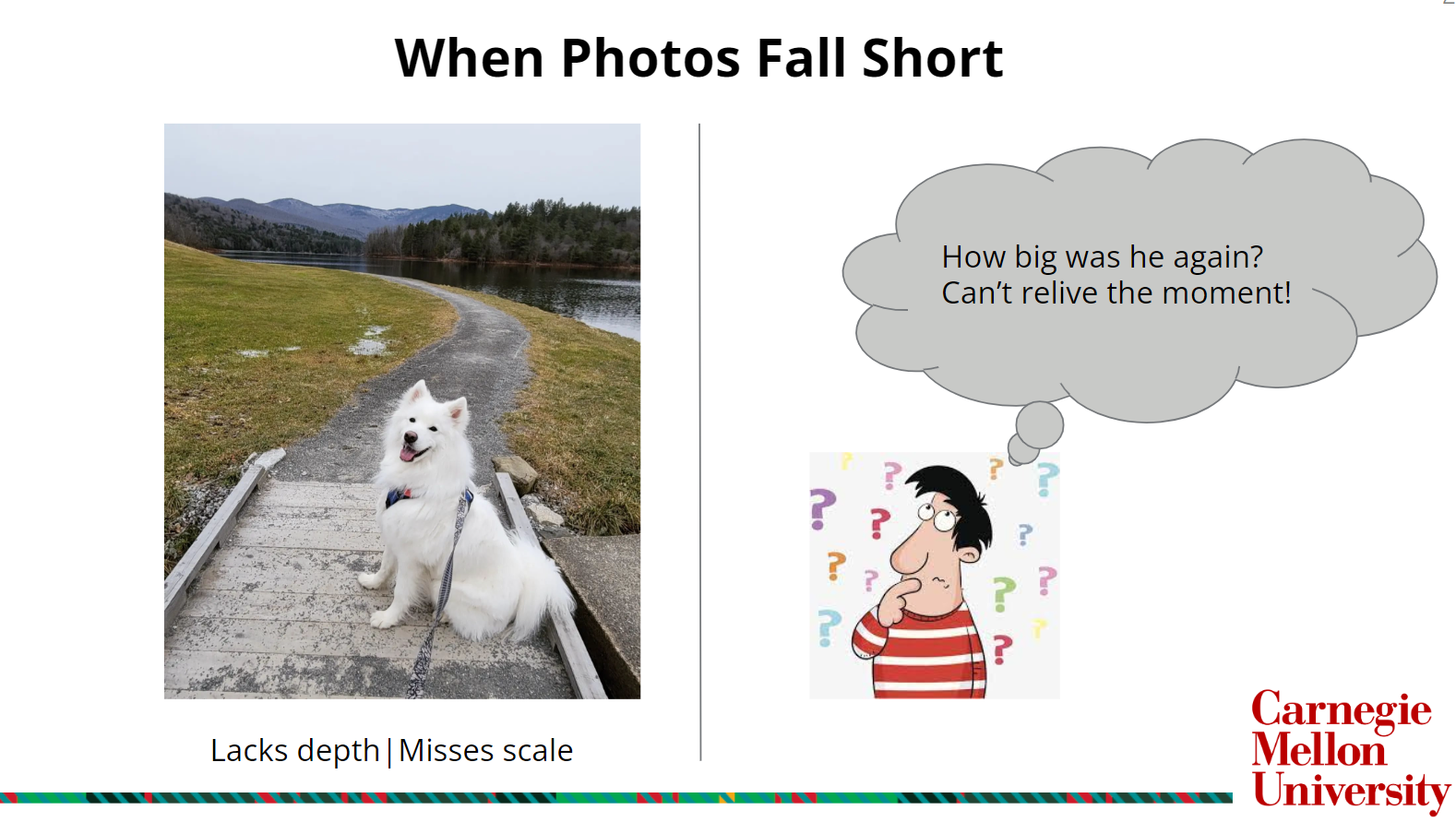
Reflecting on the moment I captured this photo, I remember being struck by the beauty of the landscape and the joyful presence of my dog Simba. But now, when I look back at the picture, the vividness of that day escapes me. The depth and scale of the scenery, the true size of my fluffy companion—these details are lost in the flatness of the 2D image. It’s a common dilemma with traditional photography. This realization spurred my interest in developing methods to transform such 2D images into 3D models, allowing us to relive our memories with a richness that matches the original experience. My work in geometric 3D reconstruction is a step towards this future, where capturing life in all its dimensions could be as simple as taking a picture with our phones..